



機械手按運動坐標型式分類:(1)直角坐標式機械手 臂部可以沿直角坐標軸X、Y、Z三個方向移動,亦即臂部可以前后伸縮(定為沿X方向的移動)、左右移動(定為沿Y方向的移動)和上下升降(定為沿Z方向的移動);(2) 圓柱坐標式機械手 手臂可以沿直角坐標軸的X和Z方向移動,又可繞Z軸轉動(定為繞Z軸轉動),亦即臂部可以前后伸縮、上下升降和左右轉動;(3)球坐標式機械手 臂部可以沿直角坐標軸X方向移動,還可以繞Y軸和Z軸轉動,亦即手臂可以前后伸縮(沿X方向移動)、上下擺動(定為繞Y軸擺動)和左右轉動(仍定為繞Z軸轉動);(4)多關節式機械手 這種機械手的臂部可分為小臂和大臂。其小臂和大臂的連接(肘部)以及大臂和機體的連接(肩部)均為關節(鉸鏈)式連接,亦即小臂對大臂可繞肘部上下擺動,大臂可繞肩部擺動多角,手臂還可以左右轉動。機械手可以通過虛擬仿真進行設計和優化。機箱沖壓機械手作用

工業機械手按驅動方式分:1、 氣壓傳動機械手,,是以壓縮空氣的壓力來驅動執行機構運動的機械手。其主要特點是:介質李源極為方便,輸出力小,氣動動作迅速,結構簡單,成本低。但是,由于空氣具有可壓縮的特性,工作速度的穩定性較差,沖擊大,而且氣源壓力較低,抓重一般在30公斤以下,在同樣抓重條件下它比液壓機械手的結構大,所以適用于高速、輕載、高溫和粉塵大的環境中進行工作。2、機械傳動機械手,即由機械傳動機構(如凸輪、連桿、齒輪和齒條、間歇機構等)驅動的機械手。它是一種附屬于工作主機的專門使用機械手,其動力是由工作機械傳遞的。它的主要特點是運動準確可靠,動作頻率大,但結構較大,動作程序不可變。它常被用于工作主機的上、下料。上海拉伸機械手企業機械手可以完成強度高、重復性的工作任務。
工業機械手的規格參數是說明機械手規格和性能的具體指標,一般包括以下幾個方面:(1)抓重(又稱臂力):額定抓取重力或稱額定負荷,單位為N(必要時注明限定運動速度下的抓重)。(2)自由度數目和坐標形式:機身、臂部和腕部等運動共有幾個自由度,并說明坐標形式。(3)定位方式:固定機械擋塊、可調機械擋塊、行程開關、電位器及其他各種位置沒定和檢測裝置;各自由度所設定的位置數目或位置信息容量;點位控制或連續軌跡控制。(4)驅動方式:氣動、液動、電動或機械傳動。
為了提高工廠的生產效率,很多工廠都在逐步的采用效率更高的機械手。目前的機械手都是靠伺服電機來提供動力的,所以大部分的機械手都是可以稱為伺服機械手。注塑機械手分類:按其他分類方式分類如下:驅動方式分為氣動,變頻,伺服。按機械結構分為旋轉式,橫行式,側取式。按手臂結構分為單截,雙截。按手臂多少分為單臂和雙臂。按X軸結構分為掛臂式和框架式。按照控制程序的不同分為多套固定程式和可自主編輯程式。按手臂可移動區分設備大小,一般以100MM遞增。機械手可以在高溫、高壓等惡劣環境下工作。

機械手有哪些分類?機械手從使用范圍、運動坐標形式、驅動方式以及臂力大小四個方面的分類。機械手按驅動方式分類:(1)液壓驅動機械手 以壓力油進行驅動;(2)氣壓驅動機械手 以壓縮空氣進行驅動;(3)電力驅動機械手 直接用電動機進行驅動;(4)機械驅動機械手 是將主機的動力通過凸輪、連桿、齒輪、間歇機構等傳遞給機械手的一種驅動方式。機械手按機械手的臂力大小分類:(1)微型機械手 臂力小于1㎏;(2)小型機械手 臂力為1-10㎏;(3)中型機械手 臂力為10-30㎏;(4)大型機械手 臂力大于30㎏。機械手可以通過機器人傳感器進行環境感知和反饋控制。光伏支架沖壓機械手價格
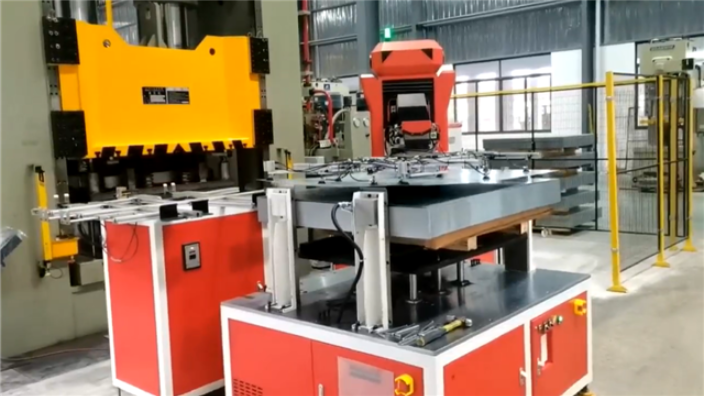
機械手在電子行業中的應用越來越普遍。機箱沖壓機械手作用
塑膠成型自動化的應用極為普遍,機械手在應用過程中主要表現以下用途:1、機械手取出模內產品,取代人將原來半自動生產轉向全自動化生產;2、機械手模外取產品,模內埋入產品(貼標簽、埋入金屬、二次成型等);3、機械手取出后之自動包裝,自動入庫;4、成型原料自動供料系統,廢料回收系統;5、整廠生產控制系統等等;因成型產品各異,自動化應用也非常繁雜因能夠取代人力效率低下,保證成型產品工藝所以應用越來越普遍。注塑機之取出機械手便是成型自動化中應用較為普遍的。機箱沖壓機械手作用